Arduino / Electronics / Lab / Microchip PIC
PIC16F87x support in ZEPPP
 by
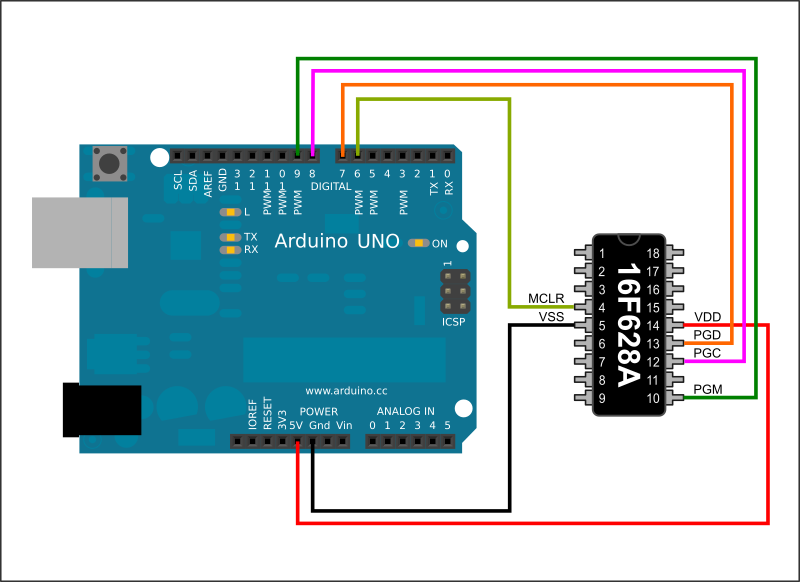
by Almost 3 years ago I developed and published ZEPPP, my Arduino-based, “Zero-External-Parts” PIC Programmer, and wrote about it here on my blog. From time to …
A maker / gamedev's blog or something.
Almost 3 years ago I developed and published ZEPPP, my Arduino-based, “Zero-External-Parts” PIC Programmer, and wrote about it here on my blog. From time to …
So in my first adventure with the STONE displays I wrote a simple Arduino library to communicate with them, and ported the firmware-side of the …
HMI?! HMI stands for Human Machine Interface, which is a fancy way of describing an element that enables the interaction between a human and a …
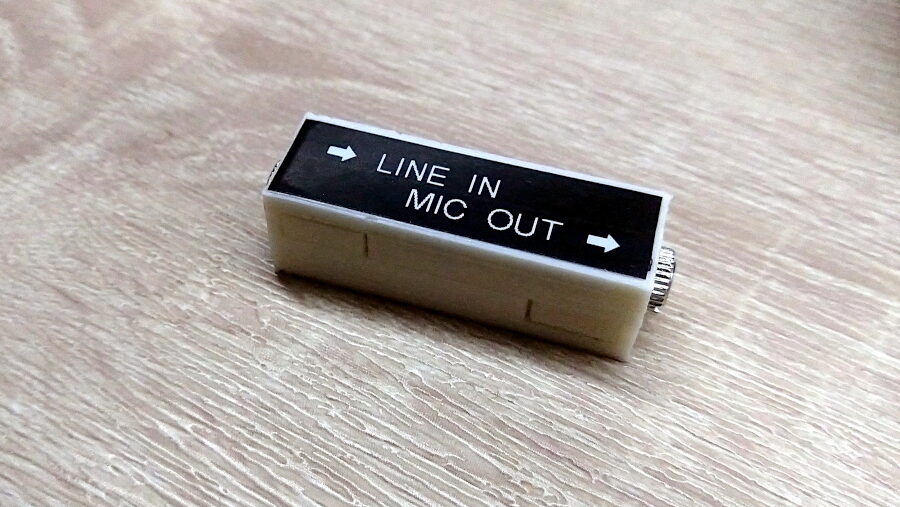
Tape recorders, computers and capture cards all seem to be happy to accept a microphone input for adding audio or voice-overs, but very few have …
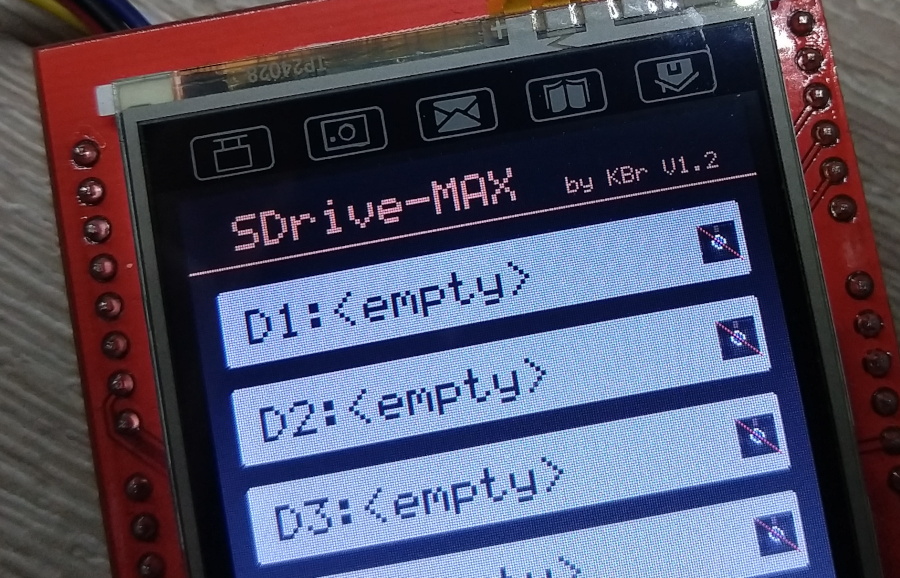
One of the things I’ve been interested in for the last year or so, is developing for the Atari family of 8-bit computers. I haven’t …
I’ve had a VC99 multimeter for a while, and one of the nice things about it, is that it can be hacked to give it …
A couple of months ago I was asked if I could prepare a sort of workshop on one of my favorite topics: ASM Programming for …
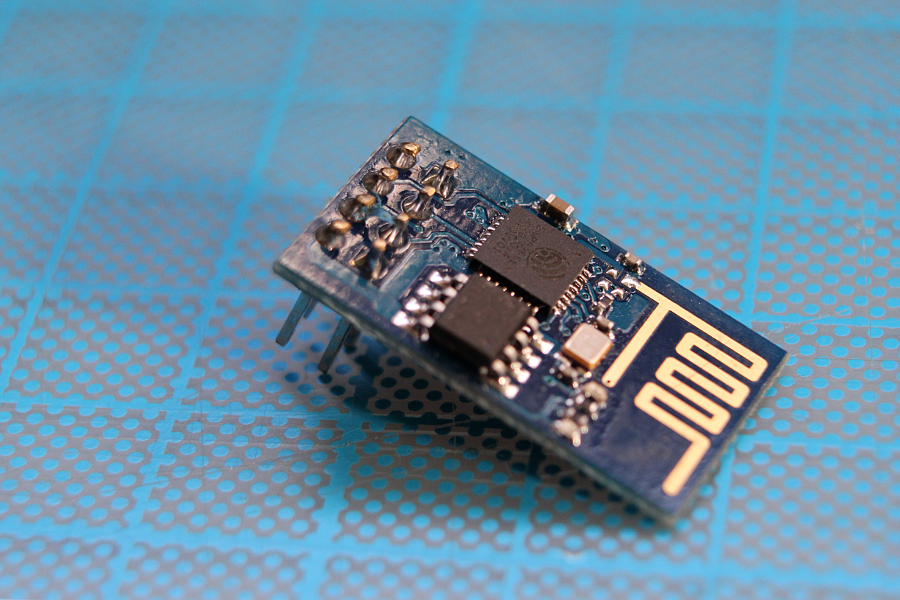
You don’t see them around that much anymore, but a few years ago the ESP-01 modules took the world by storm as quick “serial to …