Arduino / Electronics / Lab / Microchip PIC
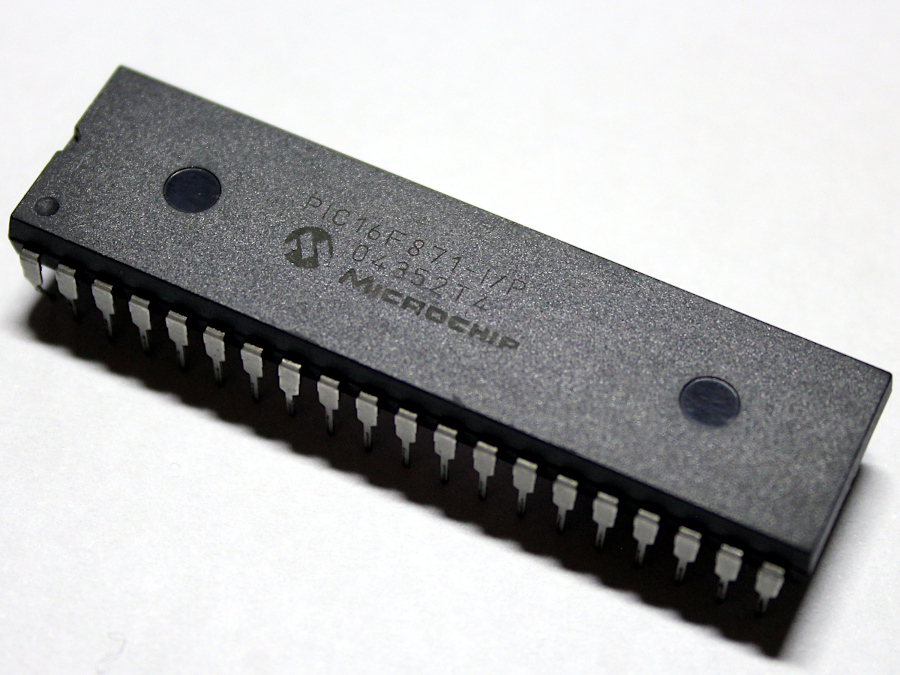
PIC16F87x support in ZEPPP
 by
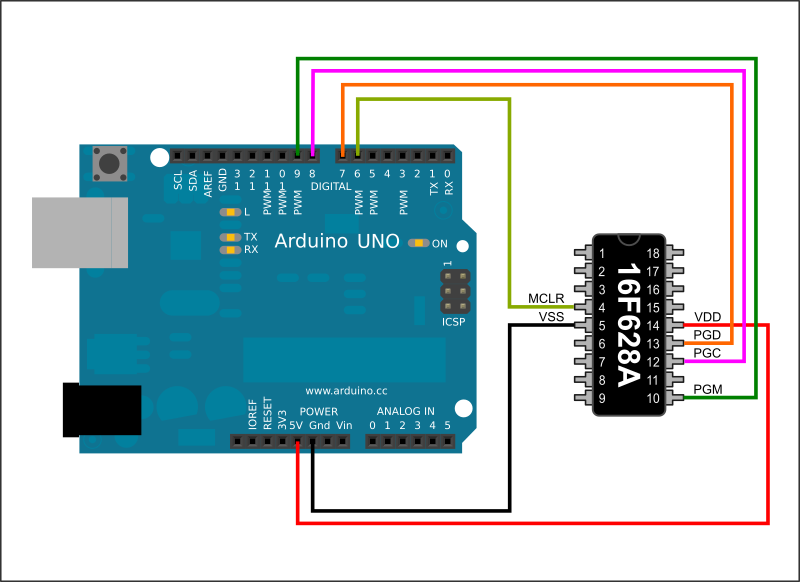
by Almost 3 years ago I developed and published ZEPPP, my Arduino-based, “Zero-External-Parts” PIC Programmer, and wrote about it here on my blog. From time to …
A maker / gamedev's blog or something.
Almost 3 years ago I developed and published ZEPPP, my Arduino-based, “Zero-External-Parts” PIC Programmer, and wrote about it here on my blog. From time to …
So in my first adventure with the STONE displays I wrote a simple Arduino library to communicate with them, and ported the firmware-side of the …
HMI?! HMI stands for Human Machine Interface, which is a fancy way of describing an element that enables the interaction between a human and a …
One of the things I’ve been interested in for the last year or so, is developing for the Atari family of 8-bit computers. I haven’t …
A couple of months ago I was asked if I could prepare a sort of workshop on one of my favorite topics: ASM Programming for …
If you are using your Arduino’s PRNG (Pseudo-Random Number Generator) for anything more serious than flashing random lights for your Christmas decorations, there’s a chance you might run …
Like a year ago I made myself a nice little desk clock that has worked fine since then. But recently I revisited the project to do …
A while ago -and after a couple of trips to our local “flea market”- I managed to get my hands on a fully working vintage Atari …