Electronics / Lab / Tutorials
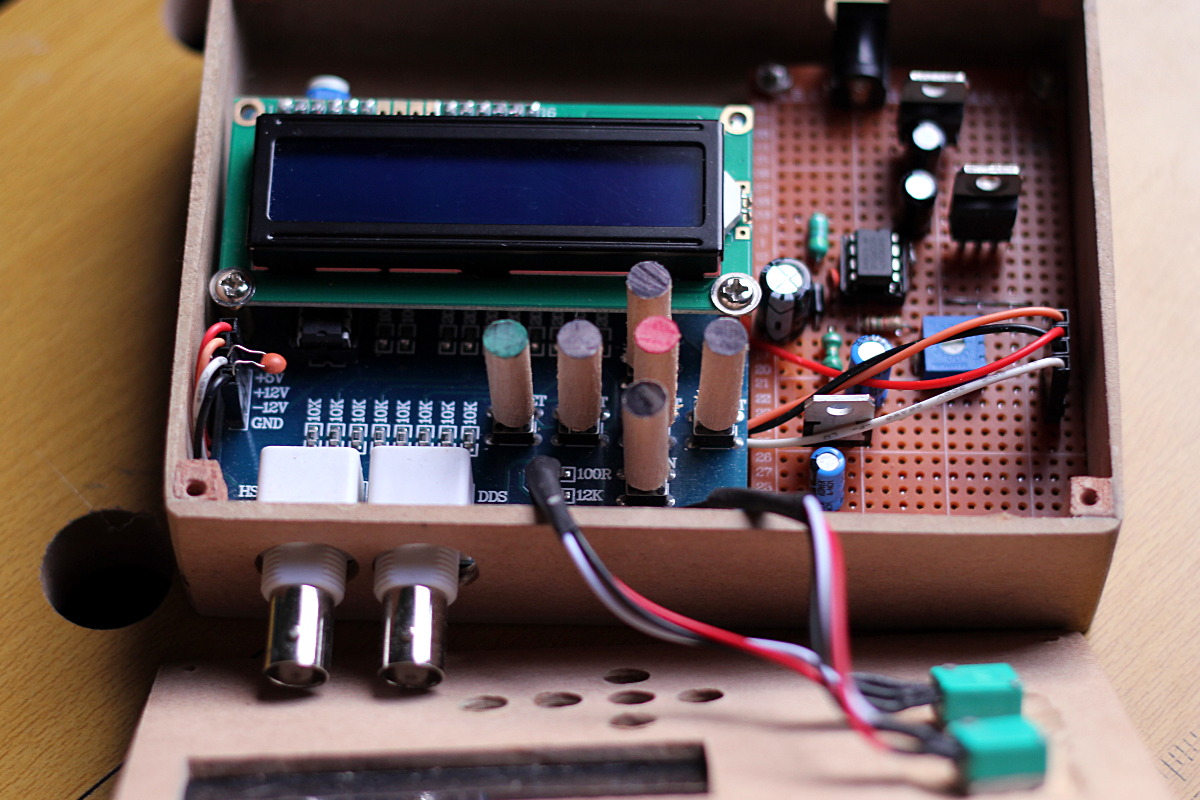
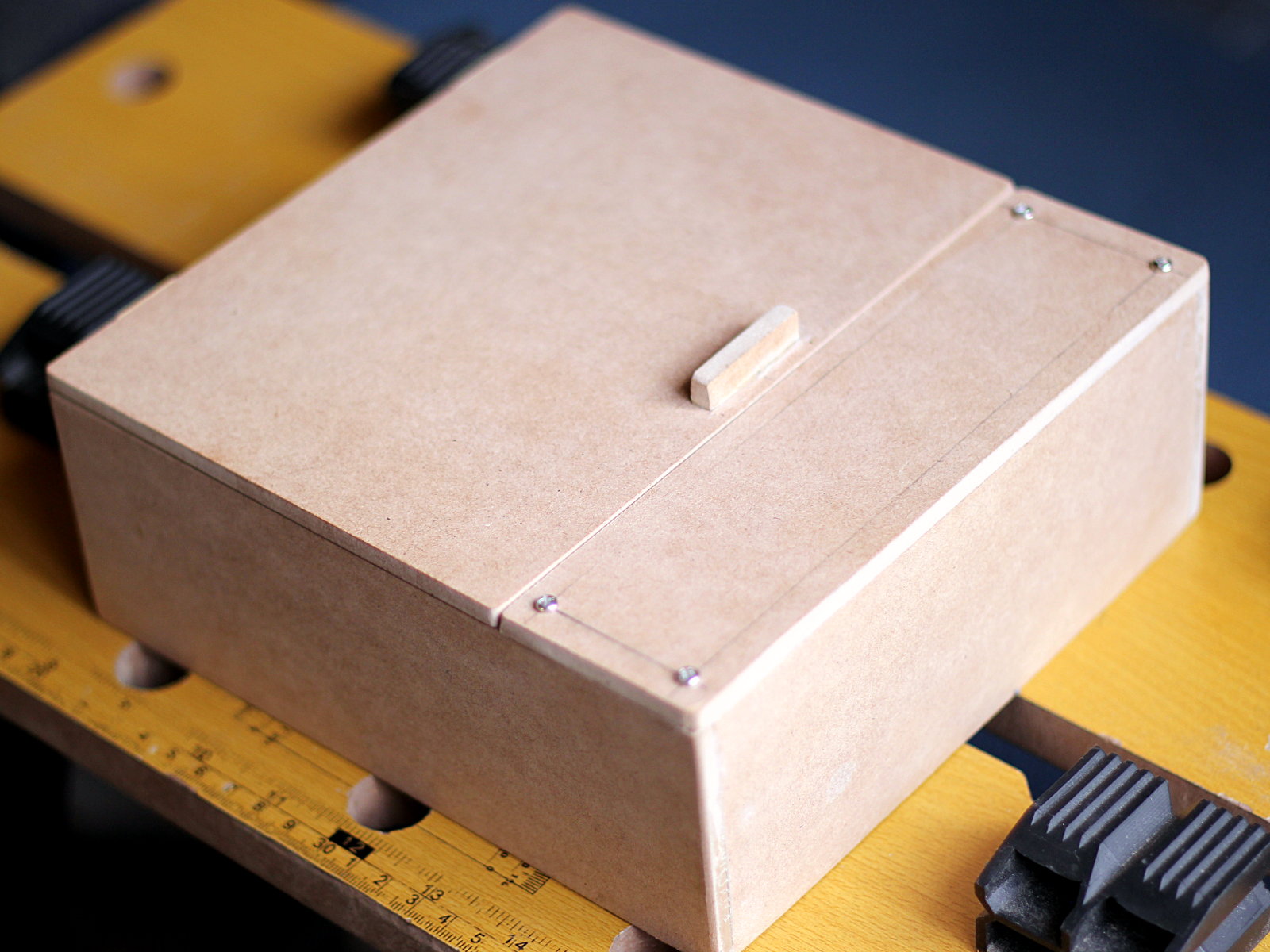
Enclosure for a D3806 Buck-Boost Switching Power Supply
 by
by Not long ago I purchased this neat and compact DC to DC Buck Boost converter that performs reasonably well. It has a maximum output of 38V, …
A maker / gamedev's blog or something.
This category contains experiments and tests, which for me usually means messing around and playing with a particular concept, technology, device or whatever. May or may not contain actual “lab” tests.
Not long ago I purchased this neat and compact DC to DC Buck Boost converter that performs reasonably well. It has a maximum output of 38V, …
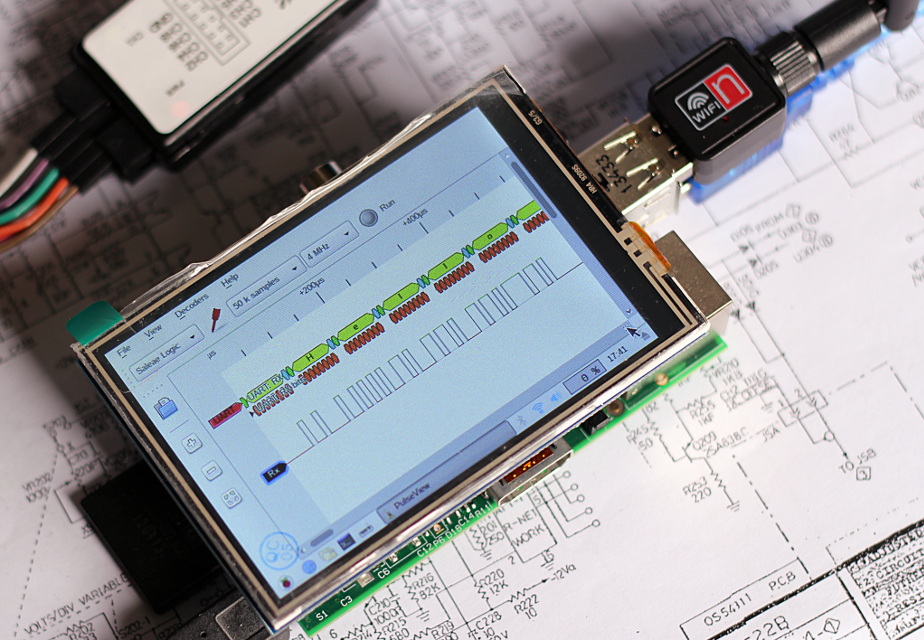
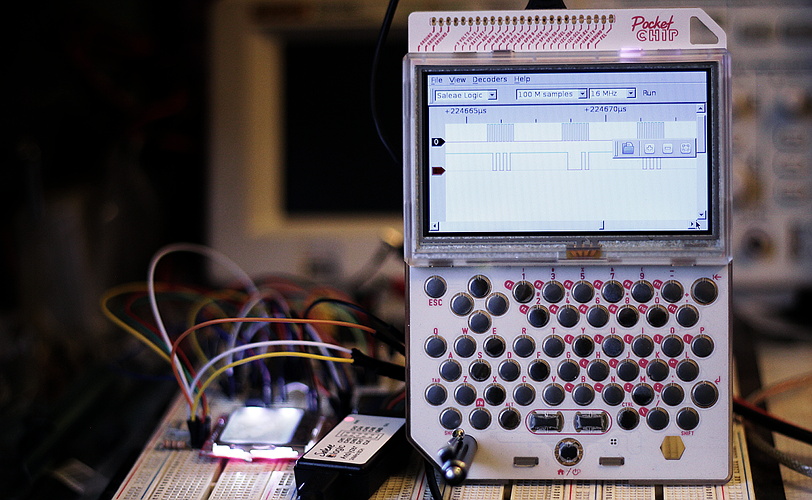
For a few months now (and after successfully using a cheap USB analyzer with my Pocket C.H.I.P) I’ve wanted to make a sort of standalone Logic Analyzer / …
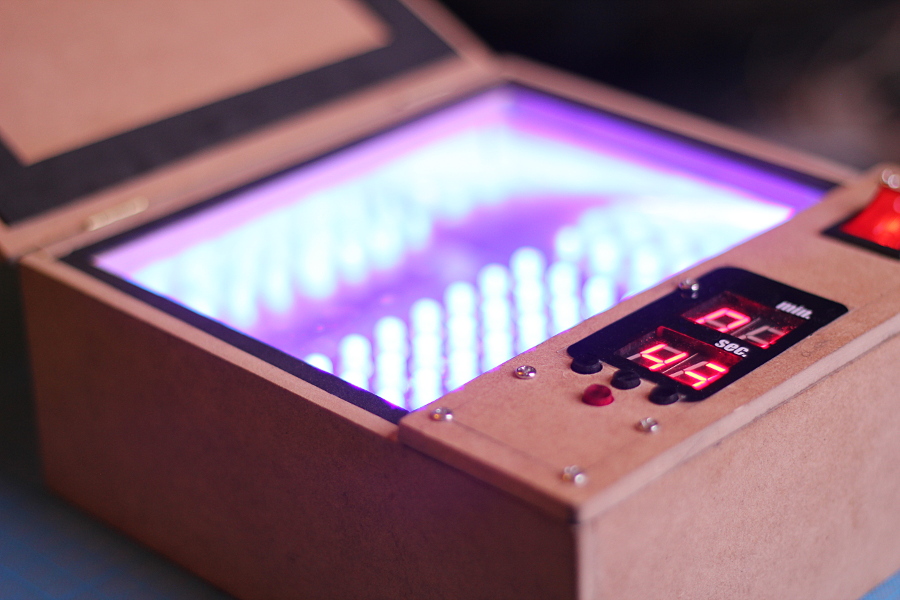
This is the second part of my adventure building a UV Exposure box, in which as you can see, I actually finished the build. In …
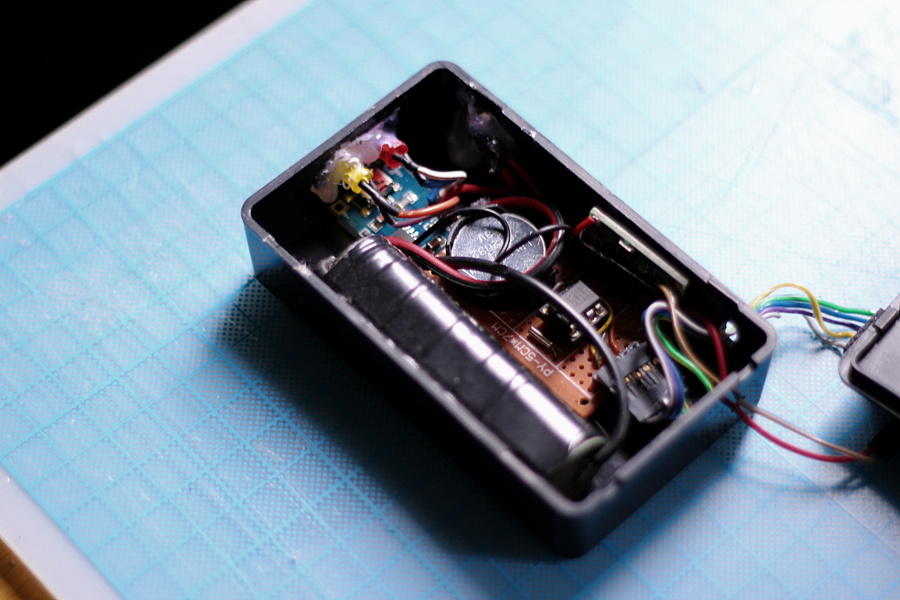
Like a year ago I made myself a nice little desk clock that has worked fine since then. But recently I revisited the project to do …
I love DIY/soldering kits, and thanks to online marketplaces like eBay I’ve been able to purchase and assemble a number of them for the past few months. One of …
In my neverending quest of improving my homemade PCBs, I discovered that adding a soldermask to my boards is actually not a hard task, thanks to a relatively …
So a time ago I purchased a cheap USB Logic Analyzer from eBay that works great with a PC, and it’s been really helpful to debug several …
So recently I had to design a relatively convoluted system with a database that communicates with a hardware controller board and a RFID reader. Among other things, the …