Making a dedicated Logic Analyzer, Part 2
 by
by It took me a really long time to do this second part of my Pi-based Logic Analyzer project, mostly because of two things; the first one …
A maker / gamedev's blog or something.
It took me a really long time to do this second part of my Pi-based Logic Analyzer project, mostly because of two things; the first one …
It has become pretty common for me to have one or two unfinished projects on my bench or the shelf, because “I just can’t find the …
If you are using your Arduino’s PRNG (Pseudo-Random Number Generator) for anything more serious than flashing random lights for your Christmas decorations, there’s a chance you might run …
Not long ago I purchased this neat and compact DC to DC Buck Boost converter that performs reasonably well. It has a maximum output of 38V, …
I have a very simple “audio/video” setup in my room. My main computer display doubles as my “TV” for playing videogames and watching movies. Technically speaking …
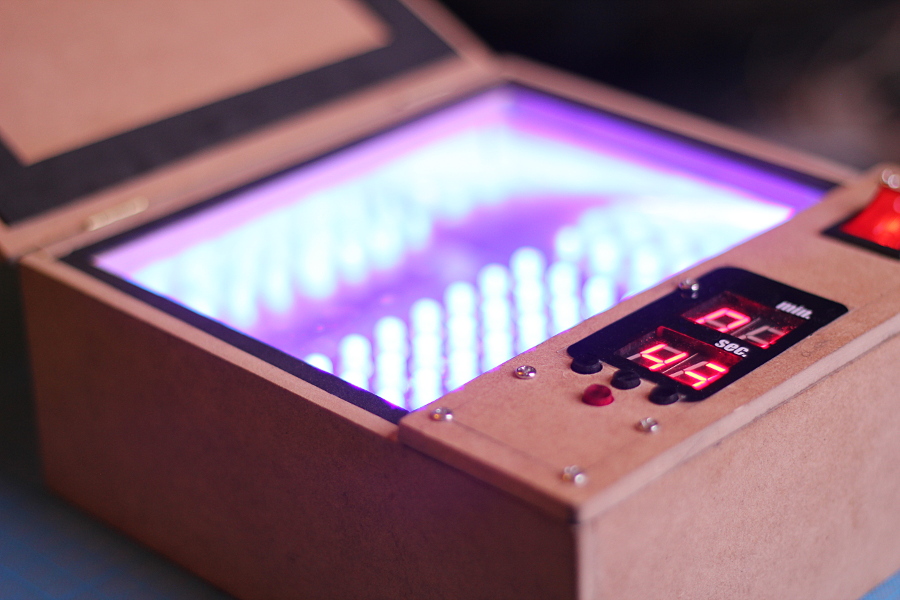
This is the second part of my adventure building a UV Exposure box, in which as you can see, I actually finished the build. In …
Like a year ago I made myself a nice little desk clock that has worked fine since then. But recently I revisited the project to do …
I love DIY/soldering kits, and thanks to online marketplaces like eBay I’ve been able to purchase and assemble a number of them for the past few months. One of …